实验名称:光聚合磁控机器人运动控制实验
实验内容:在倒置显微镜下利用电磁线圈产生多模态磁场控制光聚合机器人的运动。
研究方向:微纳磁控机器人
测试设备:ATA-2042高压放大器,电磁线圈,微控制芯片,DMD,倒置显微镜,电脑等。
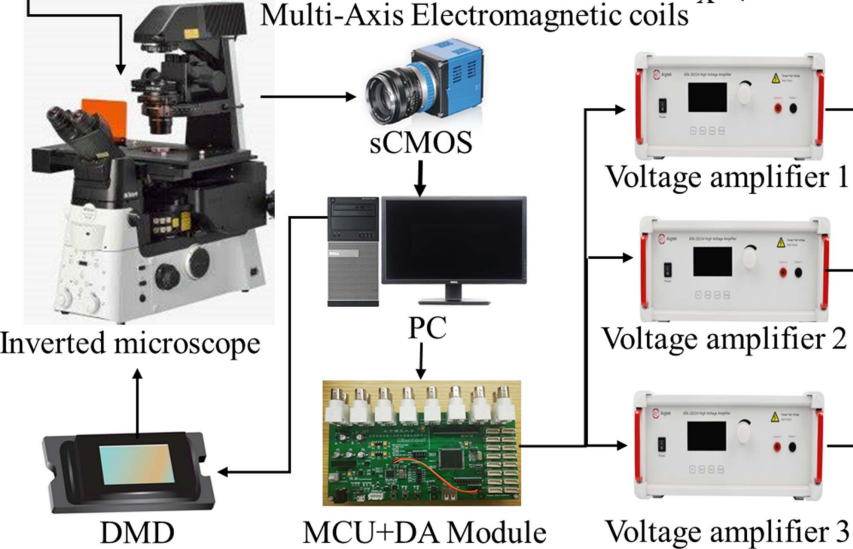
图1:实验原理图
实验过程:
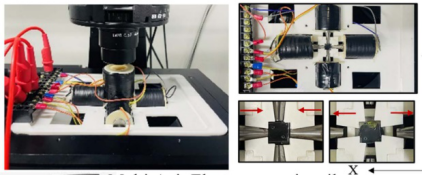
图2:实验实拍图
三台ATA-2042高功率放大器分别连接微控制芯片的输出端和电磁线圈系统的5个线圈。通过上位机发送指令经过放大器放大特定倍数后实现对电磁线圈系统的控制,利用电磁效应产生特定强度和频率的磁场。高功率放大器适用于我们高电阻线圈,有效及时响应信号。通过不同的放大倍数适用于梯度磁场和均匀磁场不同的模态。将光聚合磁控机器人放置于电磁线圈中心即可有效响应磁场控制运动。
实验结果:如附图3所示,通过控制电磁线圈系统中铁芯的位置结合控制放大器控制输入电压强度,可以有效产生梯度磁场和均匀磁场。放大器对上位机信号的快速响应使得电磁线圈系统可以灵活控制磁场模态。附图4是光聚合制造的爬行多足机器人和飞行蝴蝶机器人。在放大器输出的高频信号下,电磁线圈可以快速变化磁场方向,频率和强度,爬行机器人可以实现多足的多方向协同控制实现爬行运动和位姿方向调整。蝴蝶机器人可以实现翅膀的挥动。
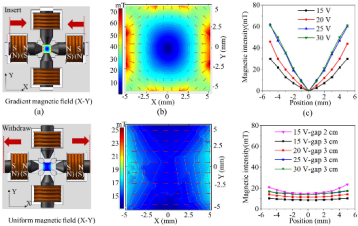
图3:梯度磁场和均匀磁场
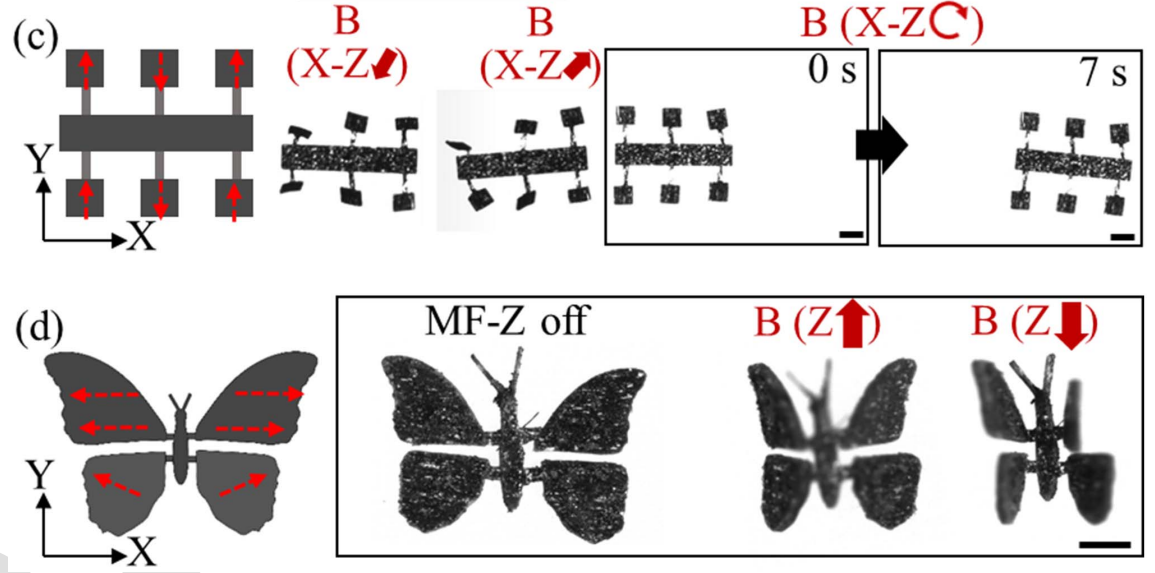
图4:光聚合制造的机器人
功率放大器推荐:ATA-2042高压放大器
图:ATA-2042高压放大器指标参数
本文实验素材由西安安泰电子整理发布。Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。西安安泰电子是专业从事功率放大器、高压放大器、功率信号源、前置微小信号放大器、高精度电压源、高精度电流源等电子测量仪器研发、生产和销售的高科技企业。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
