实验名称:介电高弹聚合物叠层弯曲驱动器的建模与控制
实验目的:通过Hamilton原理与假设模态法建立弯曲驱动器大变形过程的动力学模型,并基于该动力学模型发展了相应的自适应控制方法,补偿驱动过程中的不确定性与非线性。实验结果证明了在动态弯曲过程中相关控制策略的性能。
测试设备:高压放大器、激光位移传感器,控制板卡设备等。
实验过程:
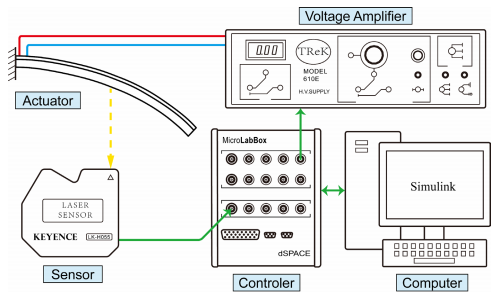
图1:叠层弯曲驱动器实验设置示意图
实验设置如图1所示。一个完整的控制流程如下:激光位移传感器测量当前弯曲驱动器的垂直位移,并将实时数据发送给控制板。控制板对位移信号进行采样,并利用插值计算对采样信号进行处理,消除驱动器水平位移的影响。速度信号则通过对相邻位移测量值进行差分运算得到,加速度信号同理。控制板根据反馈信号计算出控制量后,将模拟控制信号发送至高压放大器。高压放大器将接收到的控制信号放大,变成输出在驱动器上的电压。此外,一台通用计算机作为上位机与控制板进行通信,用于控制参数调整与数据记录。该系统的控制频率设置为1kHz。
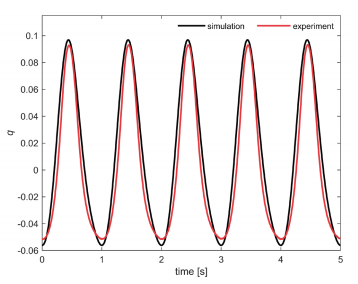
图2:参数识别实验结果,正弦激励下的位移-时间曲线
控制率式中有部分动力学参数需要进行参数辨识。参数辨识的初始值可以通过公式得到,然后进一步在Simulink软件中用仿真结果拟合实验数据以调节参数。最终得到的辨识结果。图2是输入电压信号为峰-峰值700v、频率1hz的偏置正弦波的参数识别结果,可以看出模拟结果(黑色曲线)与实验结果(红色曲线)吻合较好。最终标定出来的参数估计值会在实际控制过程中通过自适应律动态改变。
接下来,验证提出的控制器的性能。为了证明自适应律的有效性,下面的实验对比无参数自适应的控制器(C1)和有参数自适应的控制器(C2)的表现。
图3,4,5分别为跟踪正弦参考轨迹的频率为1Hz、1.5Hz和2Hz时,两个控制器的控制实验结果。可以看到,在1Hz情况下两个控制器产生的位移可以很好地跟踪参考轨迹,但C2的跟踪精度高于C1。而随着参考轨迹频率的增加,C2和C1之间的性能差距变得更大。即便C1的反馈增益
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
