一、简介
CoppeliaSim(原名V-REP)是一款功能强大的机器人仿真软件,由Coppelia Robotics开发。它提供了一个集成开发环境,用户可以在其中创建、编辑、调试和仿真各种机器人系统。CoppeliaSim的独特之处在于其分布式控制架构,允许用户为仿真中的每个对象编写独立的控制脚本,从而实现高度模块化和灵活的仿真。
CoppeliaSim支持多种编程语言进行控制脚本的编写,包括Lua(内置)、Python、C/C++、Java、MATLAB/Octave等,用户可以通过API接口与仿真环境进行交互。它内置了丰富的机器人模型、传感器和执行器,并支持导入各种CAD模型,方便用户快速搭建仿真场景。
此外,CoppeliaSim还提供了5种物理引擎(ODE、Bullet、Newton、Vortex、MuJoCo),能够精确模拟机器人与环境的物理交互,如碰撞、摩擦和重力。它还支持实时和非实时仿真,用户可以根据需求调整仿真速度。
CoppeliaSim广泛应用于机器人学研究、教育、工业自动化等领域,可以用于机器人路径规划、运动控制、传感器融合、多机器人协作以及虚拟调试等任务。其灵活性和可扩展性使其成为一个理想的工具,用于开发和测试复杂的机器人系统。
二、CoppeliaSim安装部署
2.1 配置要求
在开始安装之前,首先需要确认您的硬件环境是否满足仿真软件的运行要求,以避免因配置不足导致卡顿或崩溃。
操作系统
Windows: Windows 7、8、10、11 (64位);
macOS:intel芯片需macOS 13 及更高版本,apple芯片需macOS 15 及更高版本;
Linux:Ubuntu 22.04、 Ubuntu 24.04。通常需要 64 位系统。
处理器 (CPU)
推荐多核处理器,以获得更好的模拟性能,尤其是在处理复杂模型和大量计算时。
内存 (RAM)
最低要求:4GB RAM;
推荐:8GB RAM 或更高。处理大型场景、复杂机器人模型或运行多个模拟时,更多的 RAM 会显著提升性能。
显卡 (GPU)
CoppeliaSim 使用 OpenGL 进行渲染,因此需要支持 OpenGL 2.1 或更高版本的显卡;
推荐:具有专用显存的独立显卡 (NVIDIA 或 AMD) 可以提供更流畅的图形显示和更好的性能,尤其是在使用实时渲染和复杂纹理时。集成显卡也能运行,但在处理复杂场景时可能会性能下降。
2.2 安装流程
首先可以在官网下载安装包https://www.coppeliarobotics.com/
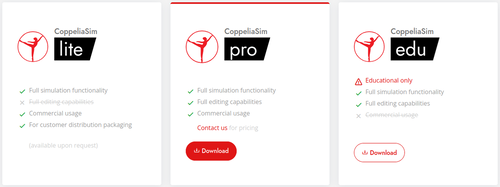
根据自己的需求选择不同的版本。不同版本详情对比如下:
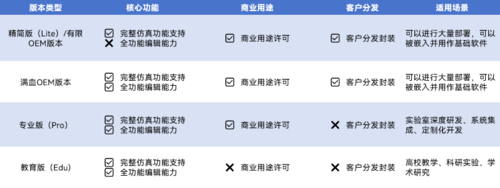
此处需要强调注意的是EDU版本,虽然早起一直采用开源形式。
但原厂正在逐步减少 EDU 版功能。且原厂从两年前开始,要求用户通过高校邮箱进行注册,并在下载与安装过程中增加验证环节。
同时也有一定的开源约束:核心插件(运动学、几何)采用双许可(非开源),免费版仅用于非商用场景(爱好者、师生、学校);商用场景如无此二插件则功能减少 80%-90%。
下载完安装包之后,便可以进入安装运行流程,下面分两种安装环境进行介绍:
Linux环境
解压下载的压缩包,进入coppeliaSim项目文件,执行命令:./coppeliaSim;
等待coppeliaSim启动,正常运行会启动coppeliasim的仿真界面;
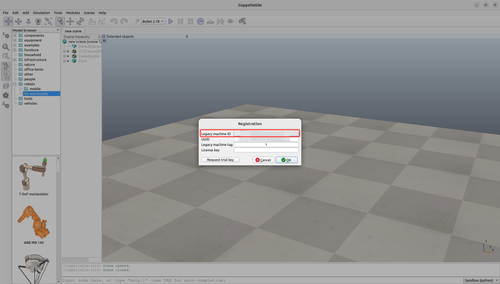
若选择Pro版本,需要使用License激活。激活步骤:点击Help -> Enter New License Key,打开对话框,将legacy machine ID发给我们团队,我们会生成绑定的License。
Windows环境
在Windows下按照一般软件的安装流程即可。
双击安装包,根据安装向导进行安装;
正常安装后,双击桌面上的图标即可启动coppeliaSim;
激活Pro版本按照上面的步骤获取License。
2.3 运行验证
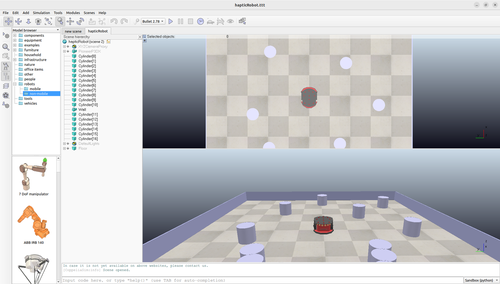
打开coppeliaSim仿真软件,旁边的model browser展示了内置的模型资产,下面是具体模型样式的预览。
 |  |
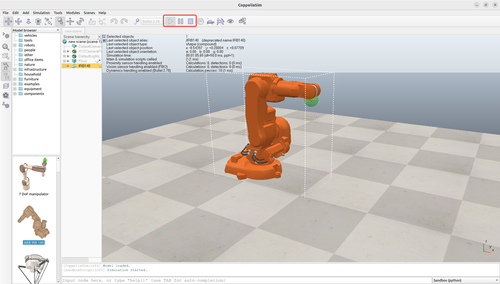
将模型拖拽到主界面中,若模型出现在仿真界面里,说明模型导入成功。点击上方的三角形播放按钮即可进行仿真,若以上步骤没有报错,说明coppeliaSim已经正确安装,可以进行仿真任务了。
三、示例demo运行
coppeliaSim内置了许多完善的仿真demo,可以在“File -> Open scene”中找到提供的样例。
选择其中的“youBotAndHanoiTower.ttt”,点击运行后可以进行智能车分拣物品的场景仿真。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。


