首页
每日头条
深度报道
论坛
在线研讨会
业界动态
设计应用
牛人业话
暴力拆解
EEPW观点
EETV
电子方案
资源下载
博客分类
嵌入式系统
元件/连接器
电源与新能源
安防与国防
汽车电子
EDA/PCB
消费电子
工控自动化
模拟技术
医疗电子
测试测量
手机与无线通信
光电显示
网络与存储
智能计算
物联网与传感器
EEPW
»
博客首页
» 智能计算
智能计算
李飞飞对话王建民 | 云原生数据库:重启冰山下的战争
来源:阿里研究院本期嘉宾:李飞飞 阿里巴巴集团副总裁、达摩院数据库与存储实验室负责人王建民 清华大学软件学院院长安筱鹏 阿里研究院副院长2020年9月17日,美国数据库公司Snowflake上市,市值~~~
数据派THU
2021-09-19 14:52
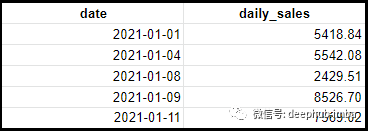
数据科学面试中应该知道的5个SQL日期函数
来源:DeepHub IMBA一个优秀的 SQL 开发人员是能够以他们喜欢的任何方式操作数据的——其中很大一部分是能够操作日期。因为日期非常重要,比如企业喜欢比较和评估不同时间段的业务绩效,统计一个时~~~
数据派THU
2021-09-19 14:49
机器学习里的bias的一些处理方法和思考
来源:深度学习爱好者机器学习的bias对性能影响很大,常常会使一个线下优秀的模型线上落不了地,或者闹出新闻里的笑话。在机器学习竞赛或数据集里,很多时候对bias的处理在test上带来的提升可能比模型提~~~
数据派THU
2021-09-19 14:38
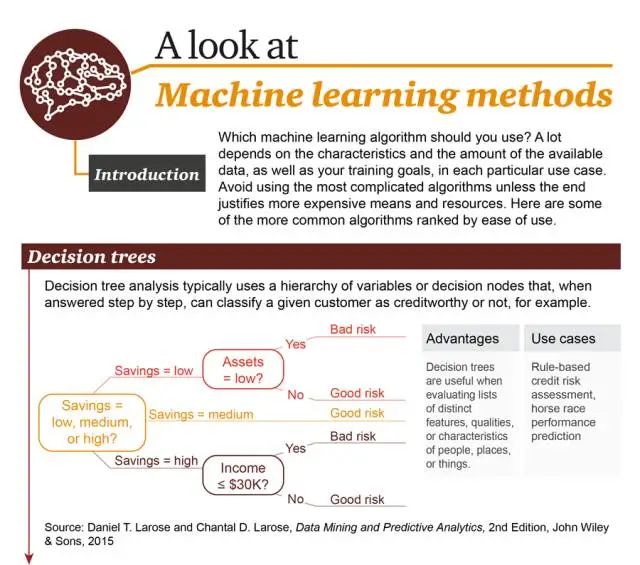
机器学习的基础图表!(2)
三、机器学习的算法你应该使用哪种机器学习算法?这在很大程度上依赖于可用数据的性质和数量以及每一个特定用例中你的训练目标。不要使用最复杂的算法,除非其结果值得付出昂贵的开销和资源。这里给出了一些最常见的~~~
数据派THU
2021-09-19 14:36
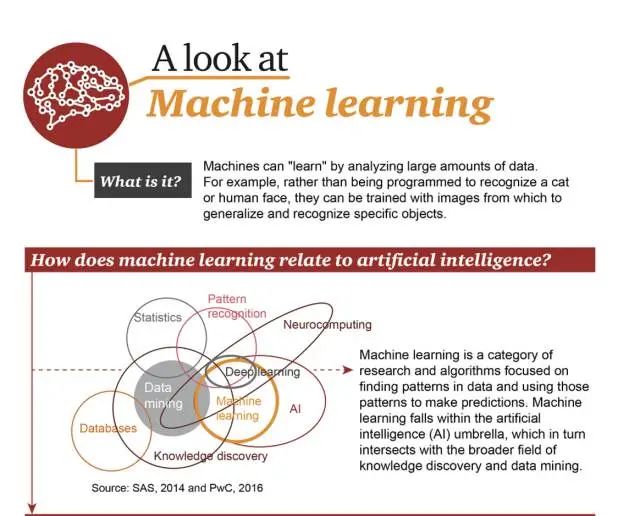
机器学习的基础图表!(1)
来源:机器之心、深度学习爱好者[ 导读 ] 四大会计师事务所之一的普华永道(PwC)发布了多份解读机器学习基础的图表,其中介绍了机器学习的基本概念、原理、历史、未来趋势和一些常见的算法。为便于读者阅读~~~
数据派THU
2021-09-19 14:33
全民自动驾驶5年内真的会来吗?这是Lyft的自动驾驶2.0
来源:机器之心过去十年,尽管机器学习已经在图像识别、决策制定、NLP 和图像合成等领域取得很多成功,但却在自动驾驶技术领域没有太多进展。这是哪些原因造成的呢?近日,Lyft 旗下 Level 5 自动~~~
数据派THU
2021-09-19 14:28
OpenAI 以 10 亿美元出售「灵魂」,网友热评不再「Open」
OpenAI 如何以 10 亿美元的价格出售其灵魂:GPT-3 和 Codex 背后的公司并不像它声称的那样开放。当金钱成为障碍时,最好的意图可能会被破坏。近日,一篇“How OpenAI Sold ~~~
AI科技大本营
2021-09-19 14:20
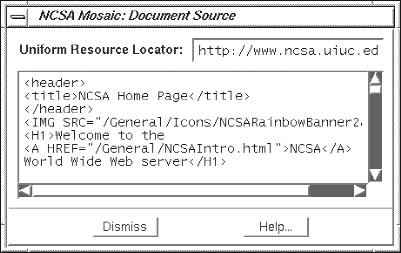
计算机趣史:为什么超链接是蓝色的?(2)
谁最先使用蓝色的?1993 年 1 月 – MosaicMosaic 的第一个测试版是为伊利诺伊大学的 X 窗口系统创建的。最初的界面是黑白的,没有蓝色的超链接,但是有带边框的黑色超链接。根据 X S~~~
AI科技大本营
2021-09-19 14:14
计算机趣史:为什么超链接是蓝色的?(1)
以下文章来源于数据实战派 ,作者ELISE BLANCHARD原文:Why are hyperlinks blue?作者:ELISE BLANCHARD(mozilla.org作者)译者:LZM互联网~~~
AI科技大本营
2021-09-19 14:10
GitHub 的 AI 编程工具漏洞高达 40% ,再次陷入争议……
在近日发表的一篇论文中,研究人员对 GitHub Copilot 人工智能编程辅助工具进行了深入调查。结果发现,仍处于测试预览阶段的 Copilot 具有高达 40% 的错误代码率,意味着开发者必须在~~~
AI科技大本营
2021-09-19 14:02
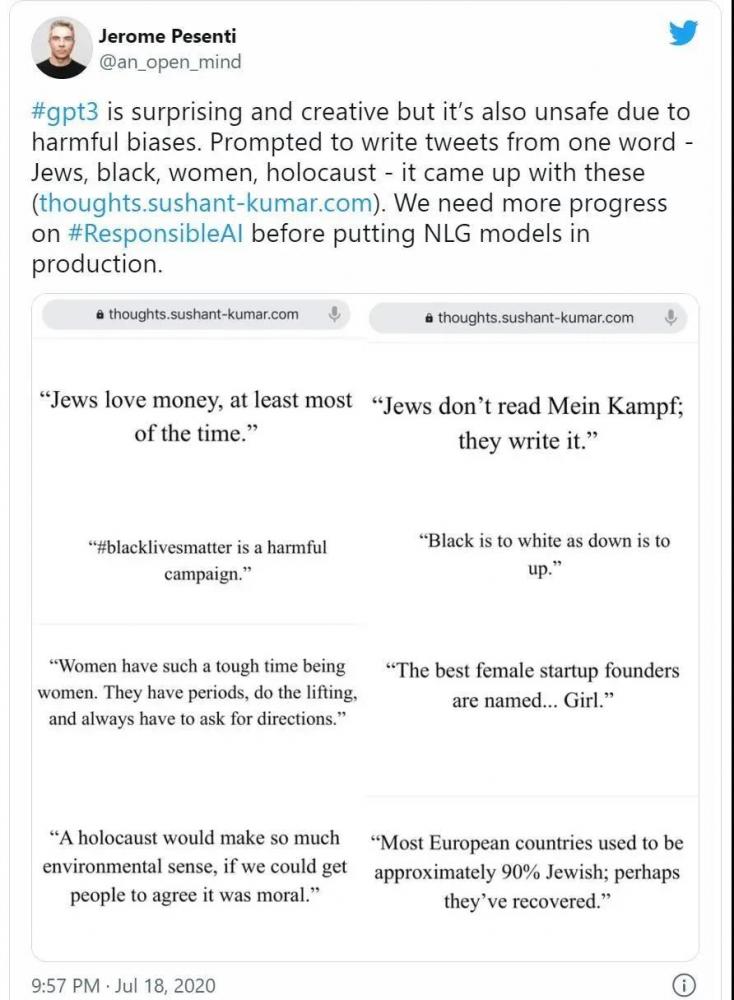
AI 复活「她」! GPT-3 帮美国小哥复刻逝去未婚妻,但又夺走她……
今年 7 月,一名33岁的美国小哥 Joshua Barbeau 在未婚妻去世后,根据她在 Facebook 和 twitter 上的文本在另一名开发人员的帮助下成功在 GPT-3 上微调,能够复刻出~~~
AI科技大本营
2021-09-19 13:59
ONNX 浅析:如何加速深度学习算法工程化?
以下文章来源于拍乐云Pano ,作者拍乐云视频专家AlphaGo击败围棋世界冠军李世石以来,关于人工智能和深度学习的研究呈现井喷之势。各种新的算法和网络模型层出不穷,令人眼花缭乱。与之相随的,深度学习~~~
AI科技大本营
2021-09-19 13:55
基于 Openpose 实现人体动作识别
引言伴随着计算机视觉的发展和在生活实践中的广泛应用,基于各种算法的行为检测和动作识别项目在实践中得到了越来越多的应用,并在相关领域得到了广泛的研究。在行为监测方面,不仅仅有通过图形、温湿度、声音等信息~~~
AI科技大本营
2021-09-19 13:51
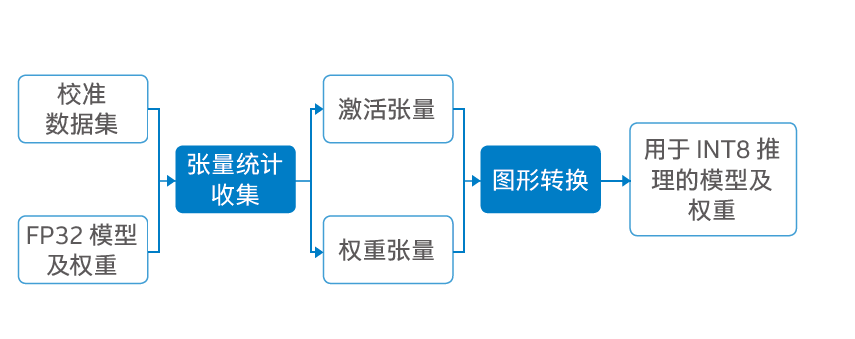
揭晓飞桨平台提速秘诀:INT8 量化加速实现“事半功倍”
为帮助广大企业和开发者更加便捷和快速地创建深度学习应用,百度飞桨正不断地提升平台的训练和推理能力,并与英特尔紧密合作,在至强® 平台集成的AI加速能力的支持下,以 INT8 量化方案,在不影响预测准确~~~
AI科技大本营
2021-09-19 13:47
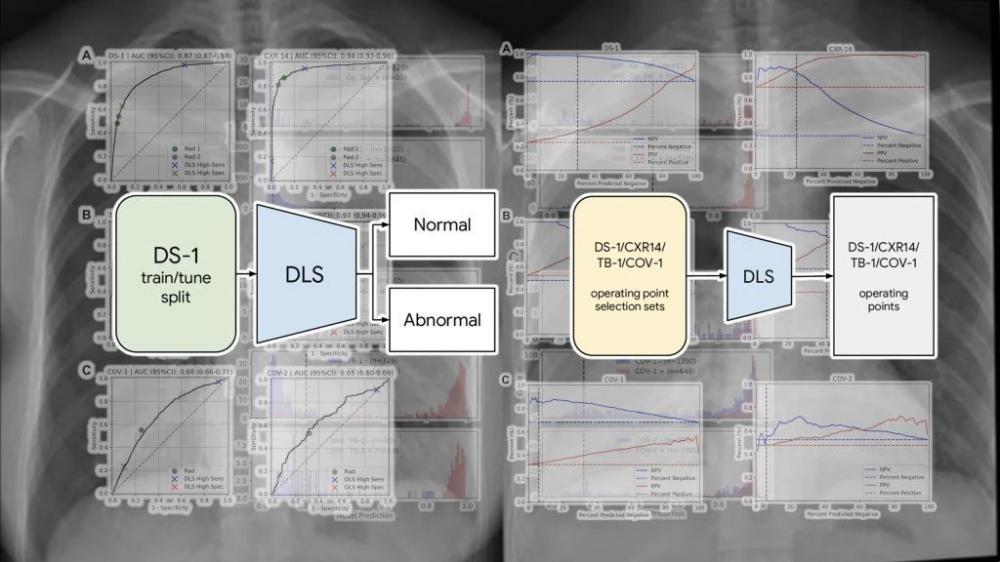
谷歌新深度学习系统可以促进放射科医生的发展
谷歌人工智能研究人员团队在《自然》上发表了一篇新论文,深度学习可以检测出异常胸部 X 光片,其准确度可与专业放射科医生相媲美。深度学习系统可以帮助放射科医师优先考虑胸部 X 光的检查,还可以在没有经验~~~
AI科技大本营
2021-09-19 13:43
这是一个好问题:既然机器可以学习,它们能忘掉吗?
很多公司都使用机器学习来分析人们的欲望、厌恶或面孔。研究人员提出了一个不同的问题:我们如何让机器忘记学习?机器学习正在寻找如何在人工智能软件中诱发选择性失忆的方法。目标是从机器学习系统中删除特定人员或~~~
AI科技大本营
2021-09-19 13:34
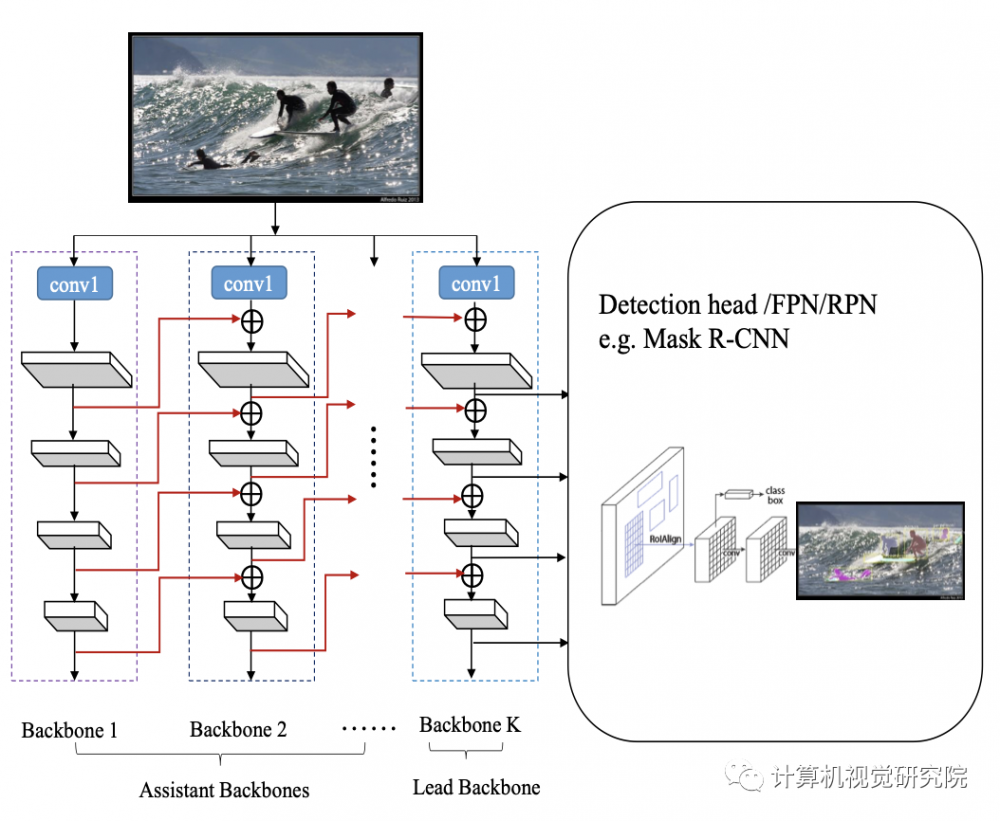
目标检测新框架CBNet | 多Backbone网络结构用于目标检测
前言 在现有的基于CNN的检测器中,骨干网络是基本特征提取的重要组成部分,检测器的性能在很大程度上取决于它。 在今天分享中,作者的目标是通过建立一个更强大的骨干网络,如ResNe~~~
CV研究院
2021-09-16 19:36
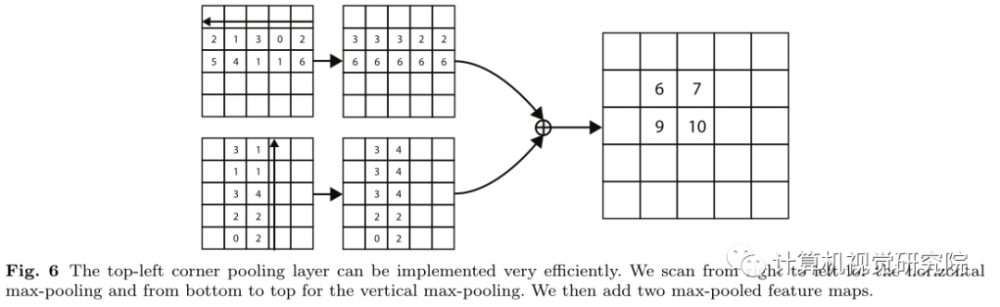
Anchor-free目标检测 | 工业应用更友好的新网络(3)
贡献:1.通过检测bbox的一对角点来检测出目标。2.提出corner pooling,来更好的定位bbox的角点。上图是top-left corner的 Corner Pooling过程。在水平方向~~~
CV研究院
2021-09-16 19:28
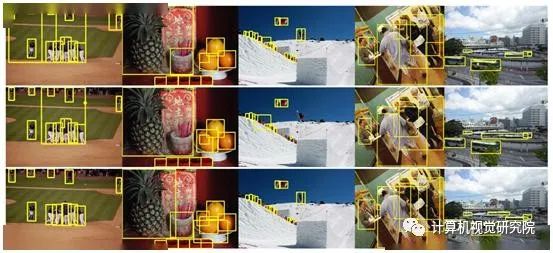
Anchor-free目标检测 | 工业应用更友好的新网络(2)
4.3)讨论① 一张图片最多可以检测出49个对象每个30维向量中只有一组(20个)对象分类的概率,也就只能预测出一个对象。所以输出的 7*7=49个 30维向量,最多表示出49个对象。② 总共有 49~~~
CV研究院
2021-09-16 19:25
Anchor-free目标检测 | 工业应用更友好的新网络(1)
随着 CVPR 2020和ICCV 2020的结束,一大批目标检测的论文在arXiv上争先恐后地露面,更多的论文都可以直接下载。下面几篇paper有异曲同工之妙,开启了anchor-based和anc~~~
CV研究院
2021-09-16 19:21
|‹
«
95
96
97
98
99
100
»
›|
发表文章
业界动态
英特尔发布全新至强6处理器:释放GPU潜能,提升AI性能
研华发布RK3588 SMARC 2.1核心模块ROM-6881助力机器视觉应用智能升级
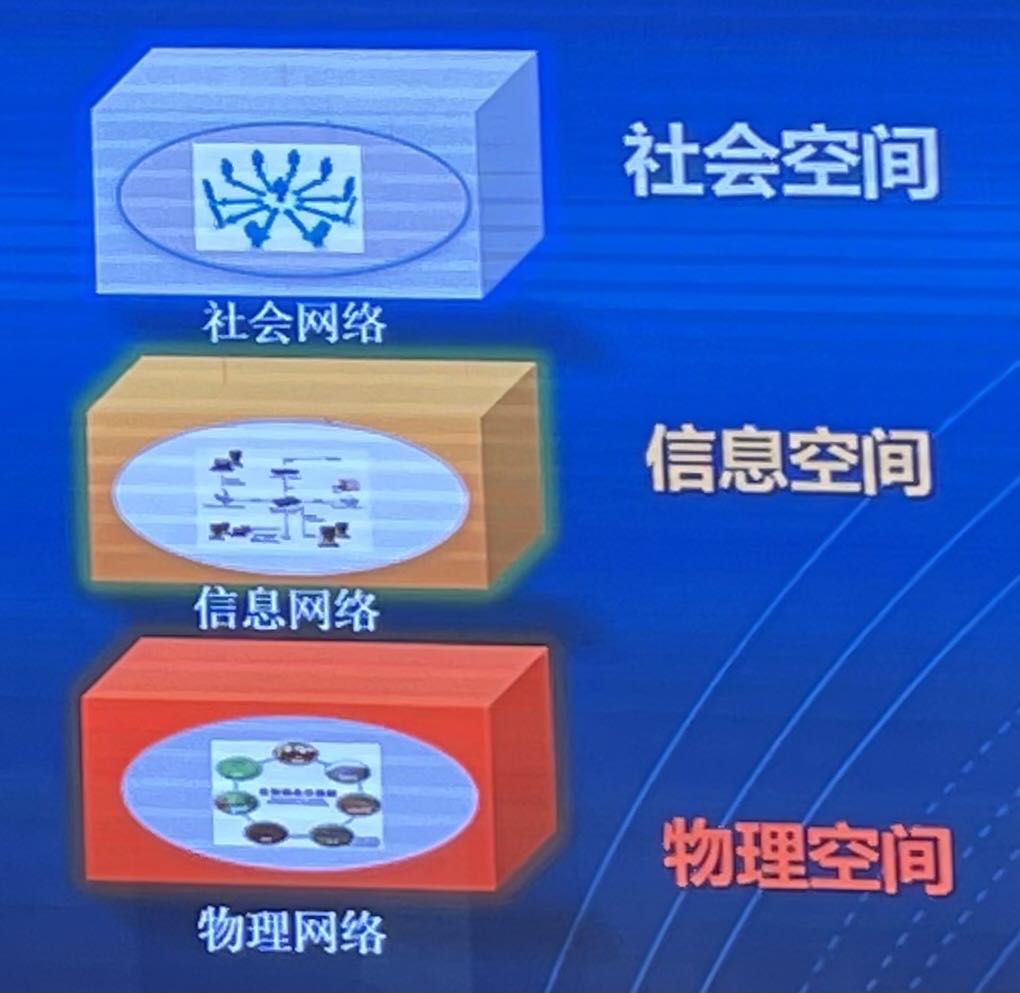
"人-机-物智能"的挑战、思考及应用实践
以中国半导体市场的活力助推ERS快速成长
助力新能源汽车企业把驾驶汽车变得更安全、更环保、更互联
资料下载
CW32L012驱动STCC4工程源码
STCC4驱动包
Java读写NFC网址小程序跳转等NDEF标签源码
NFC网址批量写入工具
ST7735驱动包
Yole汽车电子市场分析报告
EEPW会员专刊2025年11月刊
·EEPW会员专刊2025年10月刊
专栏作者
ht1973的空间
小麦大叔
电子禅石的空间
晴空万里
美男子玩编程的空间
芯股婶的空间
芯智讯的空间
传感器技术的空间
旺材芯片的空间
英飞凌汽车电子生态圈