首页
每日头条
深度报道
论坛
在线研讨会
业界动态
设计应用
牛人业话
暴力拆解
EEPW观点
EETV
电子方案
资源下载
博客分类
嵌入式系统
元件/连接器
电源与新能源
安防与国防
汽车电子
EDA/PCB
消费电子
工控自动化
模拟技术
医疗电子
测试测量
手机与无线通信
光电显示
网络与存储
智能计算
物联网与传感器
EEPW
»
博客首页
» 智能计算
智能计算
13 种必须掌握的概率分布 !干货总结!
01 概率分布概述共轭意味着它有共轭分布的关系。在贝叶斯概率论中,如果后验分布 p(θx)与先验概率分布 p(θ)在同一概率分布族中,则先验和后验称为共轭分布,先验称为似然函数的共轭先验。共轭先验维基~~~
数据派THU
2023-05-22 21:37
因果推荐技术在营销和可解释性上的应用
主要包括以下四大部分内容:1. Uplift 增益敏感性预测2. 增益敏感度的应用3. 贝叶斯因果网络的介绍4. 画像决策路径构建及可解释性应用01 Uplifit 增益敏感度预测关于 Up~~~
数据派THU
2023-05-22 21:32
KNN中不同距离度量对比和介绍(2)
距离度量对比我使用的数据集是乳腺癌数据集,可以在kaggle上直接下载这个数据集是机器学习和数据挖掘中广泛使用的基准数据集,用于二元分类任务。它是由威廉·h·沃尔伯格(William H. Wolbe~~~
数据派THU
2023-05-22 21:29
KNN中不同距离度量对比和介绍(1)
k近邻算法KNN是一种简单而强大的算法,可用于分类和回归任务。他实现简单,主要依赖不同的距离度量来判断向量间的区别,但是有很多距离度量可以使用,所以本文演示了KNN与三种不同距离度量(Euclidea~~~
数据派THU
2023-05-22 21:28
Pytorch学习之19种损失函数
来源:CSDN-mingo_敏地址:https://blog.csdn.net/shanglianlm/article/details/85019768基本用法criterion =&nbs~~~
数据派THU
2023-05-22 21:22
数据信息汇总的7种基本技术总结
1、集中趋势:平均值,中位数,众数集中趋势是一种统计测量,目的是确认最典型的个体,找到最能够代表整个组的单个数值。它可以提供对数据集中“典型”数据点的准确描述。集中趋势的三个主要度量是平均值、中位数和~~~
数据派THU
2023-05-22 21:20
少样本学习概述:算法、模型和应用
机器学习最近取得了很大的进展,但仍然有一个主要的挑战:需要大量的标记数据来训练模型。有时这种数据在现实世界中是无法获得的。以医疗保健为例,我们可能没有足够的x光扫描来检查一种新的疾病。但是通过少样本学~~~
数据派THU
2023-05-22 21:19
数仓规范详解文档(2)
命名规范统一规范采用蛇形命名法,即采用一个下划线分隔词根。优先使用词根中已有关键字(数仓标准配置中的词根管理),- - 定期 Review 新增命名的不合理性。禁止采用非标准的缩写。命名一律采用小写,~~~
数据派THU
2023-05-22 21:18
数仓规范详解文档(1)
规范约束的是数仓建设的全流程,以及后续的迭代和运维。事实上,数仓规范文档,应该随着架构设计文档,在数仓开发启动之前,分发给所有相关人员,且是所有人都必须严格遵守的约定。为什么要有规范?俗话说的好,无规~~~
数据派THU
2023-05-22 21:17
ChatGPT 会“杀死”编程吗?
自ChatGPT诞生以来,程序员所在的圈子几乎天天被它霸屏。作为一名普普通通的程序员,起初我实在不想去关注或学习ChatGPT的任何东西。与其说这是类似某些码农的傲慢作怪,倒不如说是在逃避新兴事物。如~~~
AI科技大本营
2023-05-22 20:41
大模型来了,自动驾驶还远吗?关键看“眼睛”(4)
数据闭环实践数据闭环的目的是形成场景数据到算法的闭环,达到快速提升感知性能的目的。其涉及到多个方面,例如如何挖掘高价值场景数据,如何提升标注效率,以及模型的快速部署验证等。围绕这个目标,驭势数据闭环体~~~
AI科技大本营
2023-05-22 20:39
大模型来了,自动驾驶还远吗?关键看“眼睛”(3)
感知技术的挑战与发展趋势近年来目标检测算法飞速发展,精度获得了极大提升,但仍然面对诸多挑战,包括长尾问题、如何应对极端天气等。长尾问题感知任务是典型的长尾问题,这已成为业界共识。如何挖掘长尾问题案例,~~~
AI科技大本营
2023-05-22 20:39
大模型来了,自动驾驶还远吗?关键看“眼睛”(2)
局部注意力典型方法如BEVFormer(其原理图如图8所示),该方法预先生成稠密的空间位置(含不同的高度,且不随训练更新),每个位置投影到各图片后,会和投影位置局部的数个像素块发生交互来提取特征(基于~~~
AI科技大本营
2023-05-22 20:38
大模型来了,自动驾驶还远吗?关键看“眼睛”(1)
感知系统架构与方法目标的检测与跟踪是感知系统的两大基础任务,主要利用不同传感器数据输入,完成对周围障碍物的检测与跟踪,并将结果传递给下游规划控制模块完成预测、决策、规划、控制等任务。下图1简要描述了此~~~
AI科技大本营
2023-05-22 20:37
Meta 开源 ImageBind 新模型,超越 GPT-4,对齐文本、音频等 6 种模态!(2)
ImageBind 的性能针对 ImageBind 性能,Meta 研究科学家还发布了一篇《IMAGEBIND: One Embedding Space To Bind Them All》(https~~~
AI科技大本营
2023-05-22 20:35
Meta 开源 ImageBind 新模型,超越 GPT-4,对齐文本、音频等 6 种模态!(1)
据外媒报道,上周四,Google、微软、OpenAI 几家公司的 CEO 受邀去白宫,共论关于人工智能发展的一些重要问题。然而,让人有些想不通的是,深耕 AI 多年的 Meta 公司(前身为 Face~~~
AI科技大本营
2023-05-22 20:33
OpenAI 最新“神”操作:让 GPT-4 去解释 GPT-2 的行为!
由 ChatGPT 掀起的这场 AI 革命,令人们感慨神奇的同时,也不禁发出疑问:AI 究竟是怎么做到这一切的?此前,即便是专业的数据科学家,都难以解释大模型(LLM)运作的背后。而最近,OpenAI~~~
AI科技大本营
2023-05-22 20:31
谷歌全面反攻 ChatGPT!PaLM 2、Gemini 双杀,Bard 正式开放(2)
Google 推出首个折叠屏手机 Pixel Fold在消费者产品方面,本次 I/O 的亮点是 Google 正式推出了首款折叠屏手机 Pixel Fold。Pixel Fold 外观小巧,是一款横向~~~
AI科技大本营
2023-05-22 20:30
谷歌全面反攻 ChatGPT!PaLM 2、Gemini 双杀,Bard 正式开放(1)
前几日,在 Google 官方发布的文章中提到,「自 2008 年 Google 首次举办 I/O 大会,已经过去了整整十五年。」在过去的十五年中,Google 作为全球一直领先的科技公司,深刻影响了~~~
AI科技大本营
2023-05-22 20:28
ChatGPT 增长逐渐放缓,不再能吞噬整个网络?
ChatGPT 的爆火,是昙花一现,还是未来可期?近日,网站流量分析工具 Similarweb 针对 ChatGPT 目前的数据流量现状进行了一次深度的调研。数据报告显示,ChatGPT 的指数增长似~~~
AI科技大本营
2023-05-22 20:26
|‹
«
21
22
23
24
25
26
»
›|
发表文章
业界动态
英特尔发布全新至强6处理器:释放GPU潜能,提升AI性能
研华发布RK3588 SMARC 2.1核心模块ROM-6881助力机器视觉应用智能升级
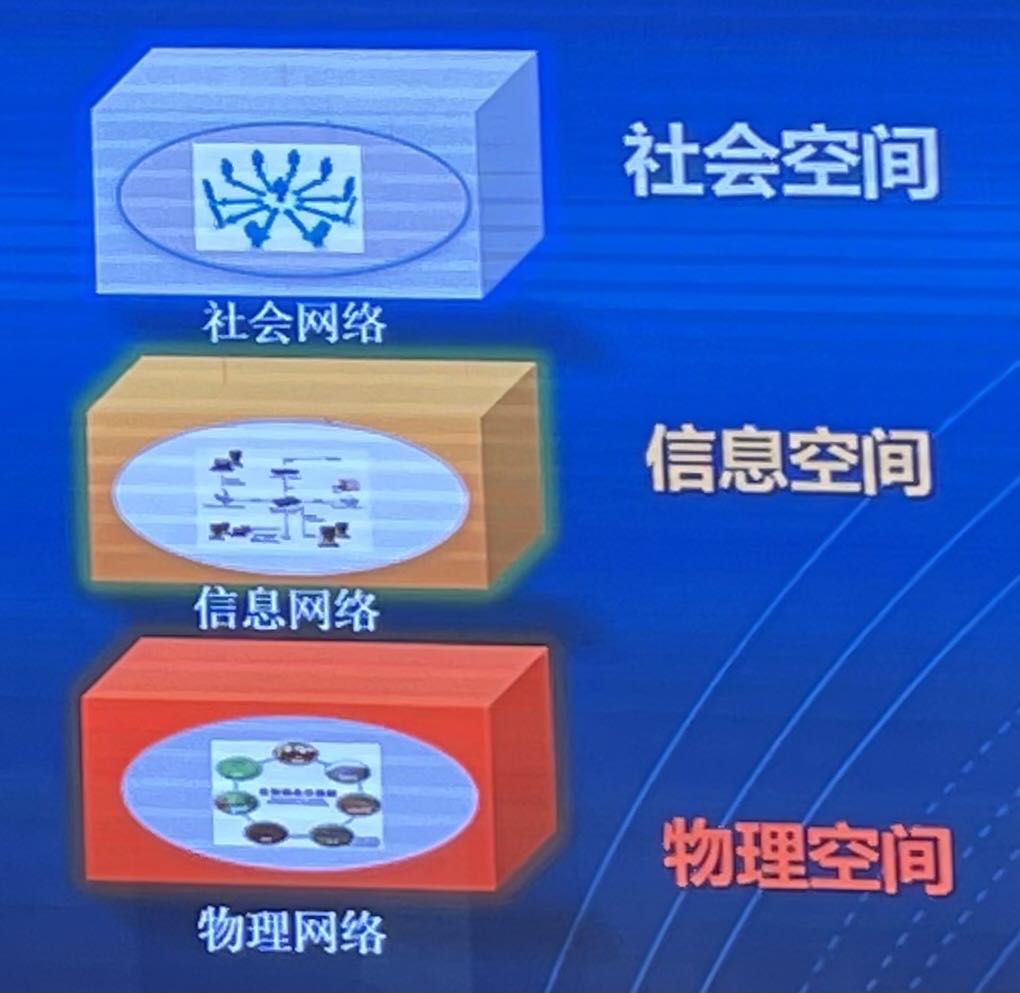
"人-机-物智能"的挑战、思考及应用实践
以中国半导体市场的活力助推ERS快速成长
助力新能源汽车企业把驾驶汽车变得更安全、更环保、更互联
资料下载
EEPW会员专刊2025年11月刊
·EEPW会员专刊2025年10月刊
EEPW会员专刊2025年9月刊
屏幕代码
CH340驱动程序3.3版
CW32L012OLED驱动
SCH-STCAI-万能实验板-V2.0
Gerber-STC-BLDC-中功率-V1.0-20251017
专栏作者
ht1973的空间
小麦大叔
电子禅石的空间
晴空万里
美男子玩编程的空间
芯股婶的空间
芯智讯的空间
传感器技术的空间
旺材芯片的空间
英飞凌汽车电子生态圈