首页
每日头条
深度报道
论坛
在线研讨会
业界动态
设计应用
牛人业话
暴力拆解
EEPW观点
EETV
电子方案
资源下载
博客分类
嵌入式系统
元件/连接器
电源与新能源
安防与国防
汽车电子
EDA/PCB
消费电子
工控自动化
模拟技术
医疗电子
测试测量
手机与无线通信
光电显示
网络与存储
智能计算
物联网与传感器
EEPW
»
博客首页
» 智能计算
智能计算
无人机都能买菜了,为什么还有这么多研究组,执着地要让人形机器人飞起来?
提到可以飞的机器人,你肯定会最先想到钢铁侠斯塔克的那套无敌盔甲,能带着斯塔克随时飞天遁地,拯救世界;又或者是脚底装了火箭发动机作为助推力的铁臂阿童木,能够在空中随意畅游。实际上,科幻电影和动画中的这些~~~
大数据文摘
2021-12-18 20:56
Nature:盐粒大小的相机,可以拍出清晰彩色照片,未来或可应用到手机
你能想象上图只有盐粒大小的物体是一款相机吗?事实上,这款微型相机甚至可以拍出清晰的全彩图像,而相比之下,普通相机的尺寸要大50万倍。我们可以来看看它的成片。这款微型相机是普林斯顿大学和华盛顿大学的研究~~~
大数据文摘
2021-12-18 20:40
Spotmini大呼追不上,苏黎世的Ascento Pro究竟何方神圣?
以下文章来源于机器人大讲堂 ,作者风雨抚蕖想必大家还记得不久前爆红网络的自动驾驶自行车,其制作人B站UP主稚晖君可谓真赛博朋克。从CAD建模、PCB设计到算法设计、参数调整,一撸到底,向我们解释了自行~~~
大数据文摘
2021-12-18 20:28
当强迫症遇上AI,这种“另类绝症”有救了?
以下文章来源于学术头条 ,作者学术头条大数据文摘授权转载自学术头条作者:朱哼哼编审:王哈哈生活中,总有一些人喜欢将自己的物品摆放整齐,或者爱干净、有洁癖。对于这类人,我们称其为“强迫症”。医学上将强迫~~~
大数据文摘
2021-12-18 20:17
斯坦福“长腿”无人机登Science子刊封面,按真鸟3D打印,能空中抓物树上栖息
大数据文摘转载自机器人大讲堂空中机器人在遥感、搜索、救援等方面获得了广泛应用。然而,它们无法像小鸟一样随意而稳定地降落在一个枝头上,这成为制约其进一步应用的因素。小鸟落在枝头这一行为并不简单:每一个树~~~
大数据文摘
2021-12-18 20:06
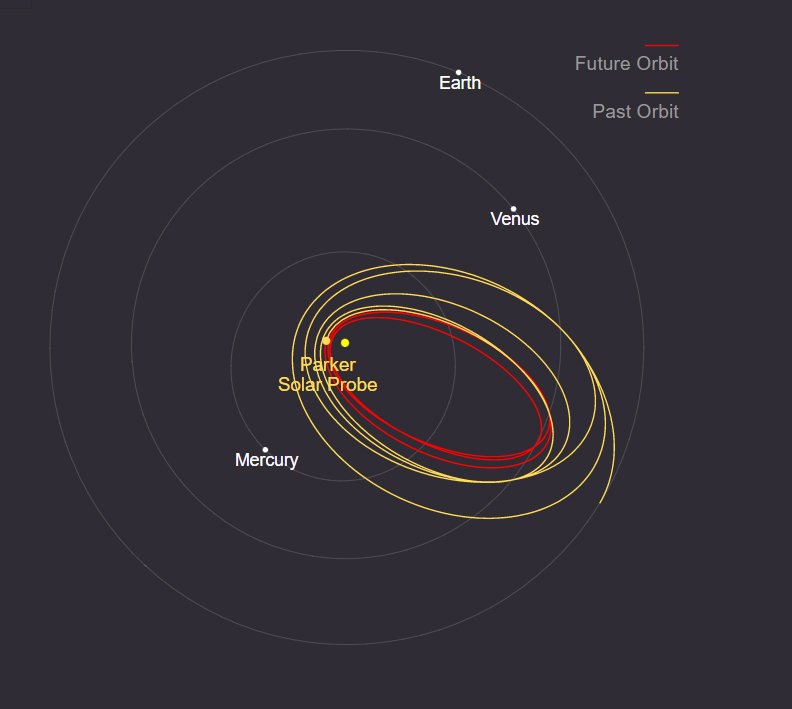
人类第一次接触到太阳“表面”!NASA官宣:帕克太阳探测器成功进入太阳大气层
当帕克太阳探测器(Parker Solar Probe)穿过太阳大气层时,人类第一次“接触”到了太阳。2021年12月25日,NASA发布消息表示,帕克太阳探测器在今年4月穿过了太阳的上层大气——日冕~~~
大数据文摘
2021-12-18 19:58
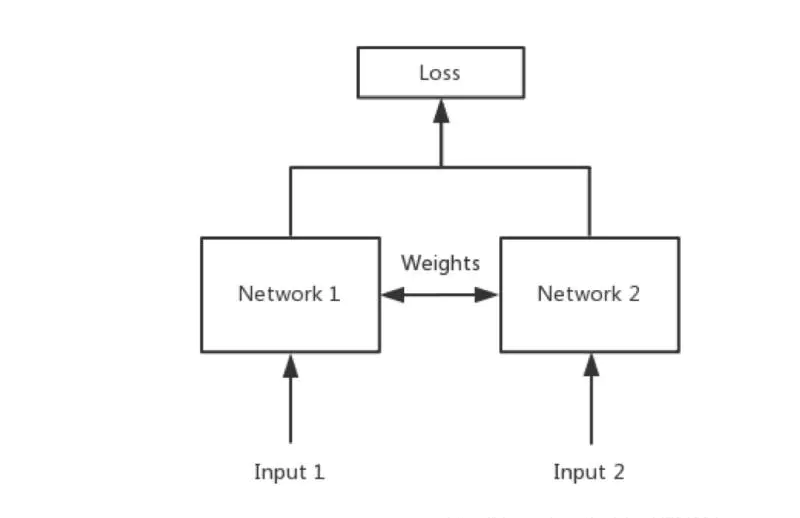
Siamese-pytorch孪生网络实现评价图像相似度
来源:机器学习AI算法工程 什么是孪生神经网络简单来说,孪生神经网络(Siamese network)就是“连体的神经网络”,神经网络的“连体”是通过共享权值来实现的,如下图所示。所谓权值共~~~
数据派THU
2021-12-18 19:46
NeurIPS 2021 | 寻MixTraining: 一种全新的物体检测训练范式
来源:专知MixTraining: 一种全新的物体检测训练范式论文链接:https://www.zhuanzhi.ai/paper/b52468c0ddce3d49f7740cfd1528a7a0代码~~~
数据派THU
2021-12-18 19:36
机器视觉特征提取:HOG、SIFT、SURF、ORB、LBP、HAAR
来源:机器学习AI算法工程 目录一、SIFT(尺度不变特征变换)二、HOG(方向梯度直方图)三、SIFT和HOG的比较四、SIFT/HOG与神经网络特征提取的比较五、其他传统特征提取的方法(~~~
数据派THU
2021-12-18 19:33
2W字长文 | 漫谈工业界图神经网络推荐系统(5)
3.6 Gemini: A Novel and Universal Heterogeneous Graph Information Fusing Framework for Online Recomm~~~
数据派THU
2021-12-18 13:16
2W字长文 | 漫谈工业界图神经网络推荐系统(4)
3. 论文介绍3.1 Graph Convolutional Neural Networks for Web-Scale Recommender Systems[46] [PinSage],KDD 2~~~
数据派THU
2021-12-18 13:03
2W字长文 | 漫谈工业界图神经网络推荐系统(3)
2. 论文总结该章节对选取的工业界的文章的共性部分进行总结,除了有人比较喜欢用来水论文的模型结构也涉及了图的构建,特征使用,采样方法,结合方式等部分。可以看到,对GNN的应用基本遵循着这套框架。2.1~~~
数据派THU
2021-12-18 12:42
2W字长文 | 漫谈工业界图神经网络推荐系统(2)
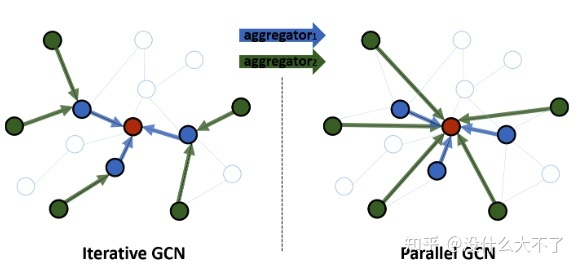
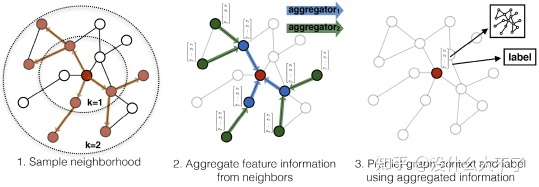
1.3 Scalable GNN1.3.1 问题背景一方面,GCN在设计之初其卷积操作是在全图上进行的,在每一层对于所有结点聚合1阶邻居并融入自身表征,这样第K层的输出表征就包含了K阶邻居的信息。另一~~~
数据派THU
2021-12-18 12:39
2W字长文 | 漫谈工业界图神经网络推荐系统(1)
图神经网络是近年来很火的一个研究方向,在生物化学,推荐系统,自然语言处理等领域都得到了广泛应用。其中图神经网络在推荐系统的应用方面,已有几篇综述[1][2][3]做过详细的归纳总结。但是让人感到美中不~~~
数据派THU
2021-12-18 12:20
使用自变分原理改进正则化核回归:通过变分法推导和推广Nadaraya-Watson估计
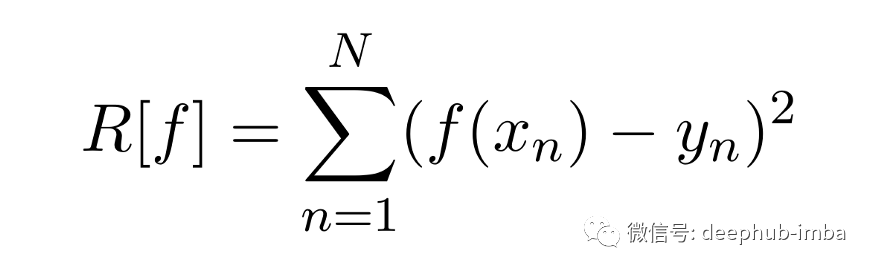
来源:Deephub Imba核回归技术是一组非参数方法,用于通过一组数据点拟合平滑的曲线。Nadaraya-Watson 估计就是这样一种方法。它通常是在自变量分布的核密度估计以及因变量和自变量联合~~~
数据派THU
2021-12-18 12:08
独家 | 为什么程序员不应该长期留在一家公司?
作者:Entreprogrammer翻译:欧阳锦校对:赵茹萱图源:Proxyclick Visitor Management System(Unsplash)最近,我与两个月前入职我公司的一位程序员交~~~
数据派THU
2021-12-18 11:52
图对抗防御研究进展
图神经网络(GNN)在多个领域的复杂任务中已经得到成功的应用,但研究表明其易受到对抗攻击而导致性能严重下降,这种脆弱性影响了包含节点分类、链路预测和社团探测在内的所有应用。图对抗攻击已经可以高效地实施~~~
数据派THU
2021-12-18 11:45
英伟达把P图软件GAN了
英伟达的最新AI工具又让网友用户们激动了。“我已经等不及了!”一位网友在看完演示视频后表示。对于“手残党”来说,英伟达的EditGAN简直就是零基础P图神器。能够高质量、高精细度地对图像进行修改,让P~~~
数据派THU
2021-12-18 11:41
独家 | 图片主题建模?为什么不呢?!
作者:Maarten Grootendorst翻译:陈超校对:赵茹萱主题建模是一种允许用户在无监督情况下,在海量数据当中寻找主题的一系列技术合集、在这些文件内容当中尝试建模并跑EDA模型的时候是非常冒~~~
数据派THU
2021-12-18 11:34
使用深度学习检测混凝土结构中的表面裂缝
以下文章来源于小白学视觉 ,作者小白混凝土建筑裂缝介绍表面裂缝检测是监测混凝土结构健康的一项重要任务。如果裂纹发展并继续扩展,它们会减少有效承载表面积,并且随着时间的推移会导致结构失效。裂纹检测的人工~~~
AI科技大本营
2021-12-15 15:32
|‹
«
85
86
87
88
89
90
»
›|
发表文章
业界动态
英特尔发布全新至强6处理器:释放GPU潜能,提升AI性能
研华发布RK3588 SMARC 2.1核心模块ROM-6881助力机器视觉应用智能升级
"人-机-物智能"的挑战、思考及应用实践
以中国半导体市场的活力助推ERS快速成长
助力新能源汽车企业把驾驶汽车变得更安全、更环保、更互联
资料下载
CW32L012驱动STCC4工程源码
STCC4驱动包
Java读写NFC网址小程序跳转等NDEF标签源码
NFC网址批量写入工具
ST7735驱动包
Yole汽车电子市场分析报告
EEPW会员专刊2025年11月刊
·EEPW会员专刊2025年10月刊
专栏作者
ht1973的空间
小麦大叔
电子禅石的空间
晴空万里
美男子玩编程的空间
芯股婶的空间
芯智讯的空间
传感器技术的空间
旺材芯片的空间
英飞凌汽车电子生态圈